
by Keith Clemmons | Apr 23, 2013 | Nature, Science, Technology
Robobees Scientific American recently published an article on the emerging technology of Robobees. Researchers at Harvard have been working on creating flying robots to perform the tasks of a colony of bees. Beyond pollination, there are many other possible...
by Keith Clemmons | Mar 27, 2013 | Nature, Philosophy, Science, Uncategorized
Your DNA is now pwned! A study from the scientific journal, Genome Medicine, evaluated the current patents on genomes and came to a surprising conclusion. Nearly all of the human genome has been patented! Humans don’t “own” their own genes, the...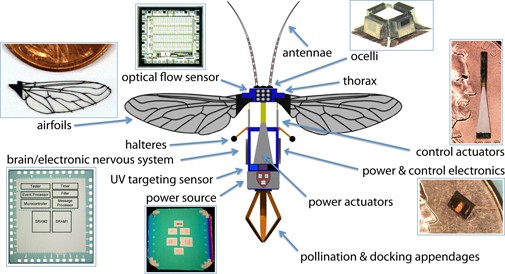


Recent Comments